
机械性能试验:静拉伸试验的特点与意义及详细介绍
一、静拉伸试验的特点与意义
静拉伸是一种简单的力学性能试验,在测试标距内,受力均匀,应力应变及其性能指标测量稳定、可靠、理论计算方便。通过静拉伸试验,可以测定材料弹性变形、塑性变形、和断裂过程中最基本的力学性能指标,如正弹性模量E、屈服强度σ0.2、屈服点σs、抗拉强度σb、断后延长率δ及断面收缩率ψ等。静拉伸试验中获得的力学性能指标,如E、σ0.2、σs、σb、δ、ψ等,是材料固有的基本属性和工程设计中的主要依据。
二、静拉伸试样

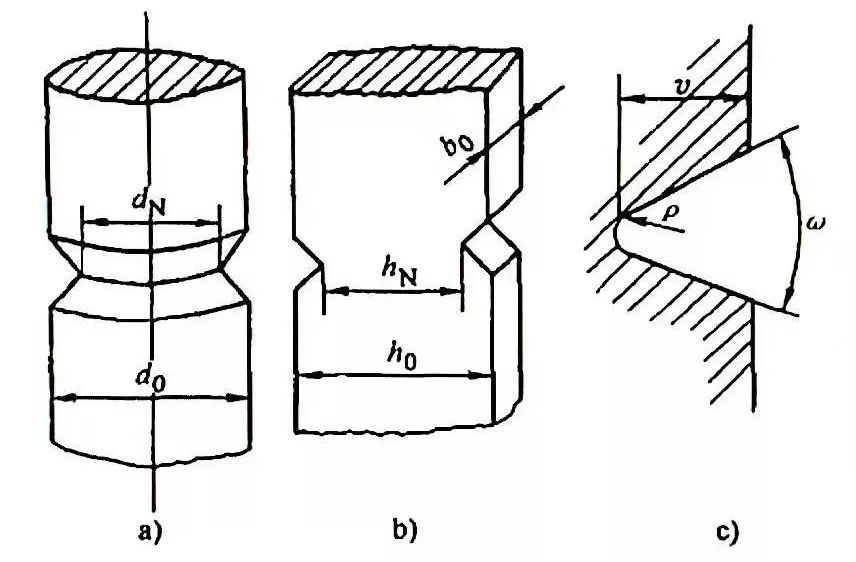
静拉伸试样分为比例试样和非比例试样两种。圆截面比例试样是按公式
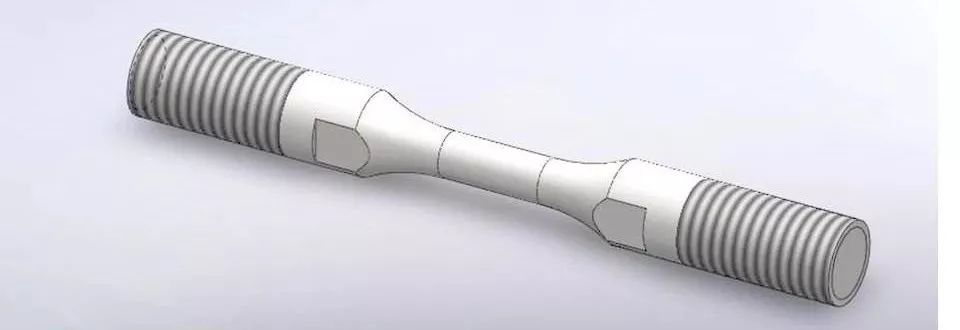
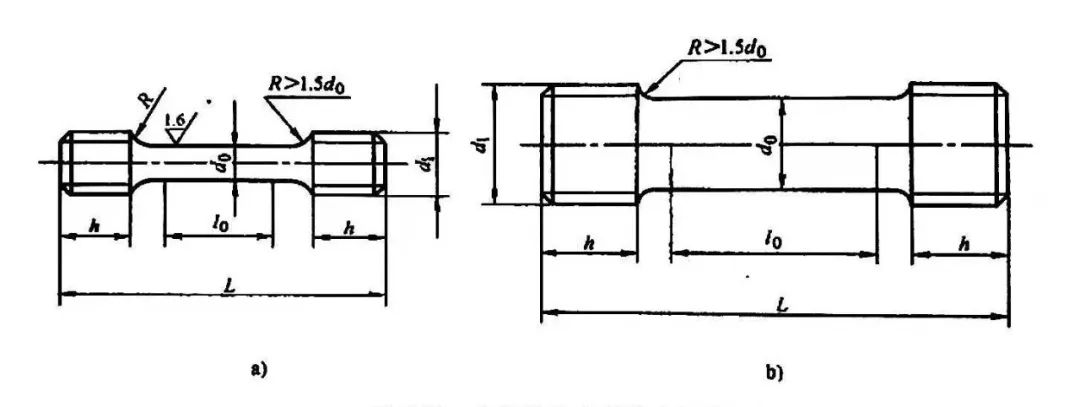
计算而得到试样尺寸的。式中的l0为标距长度;S0为试样原始面积;系数K通常为5.65或11.3,前者称为短试样,后者称为长试样。据此,长、短圆试样的标距长度l0分别为 10d0和5d0 (d0为圆试样直径)。除圆截面试样外还有板状试样,常用的试样有六种形式,如图1所示。灰铸铁和球墨铸铁的静拉伸试样如图2所示,尺寸见表1和表2 。
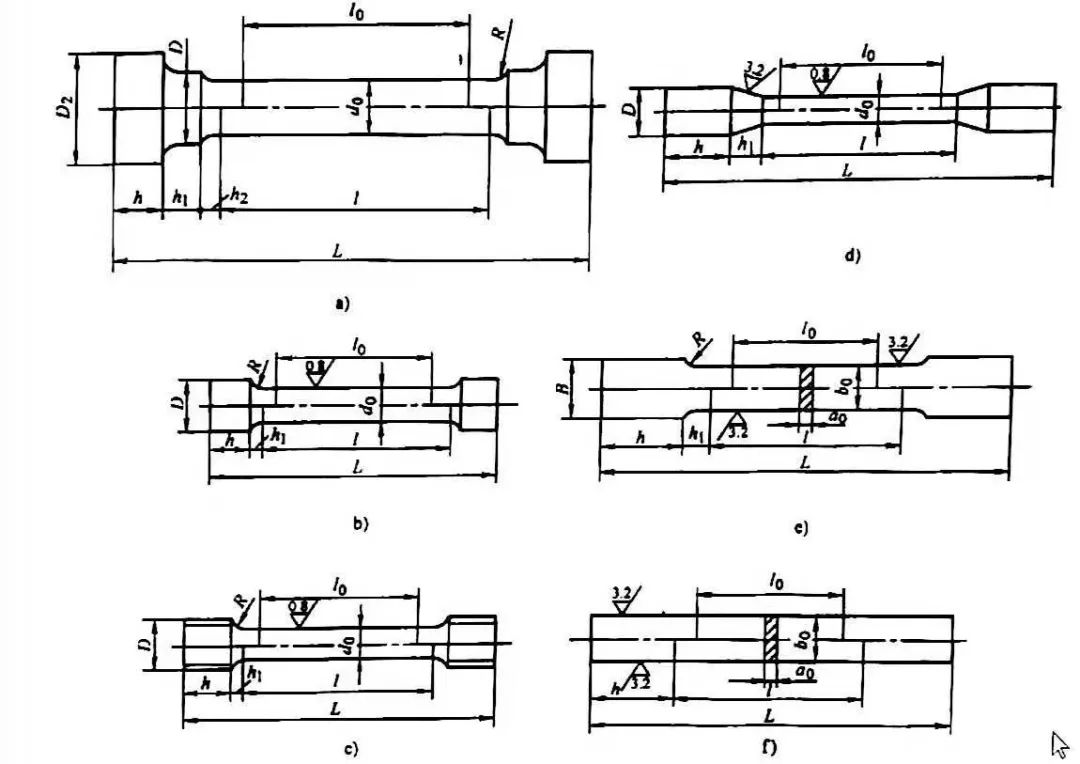
▲图1 圆形及板状拉伸试样形状
▼表1 灰铸铁拉伸试样尺寸(mm)
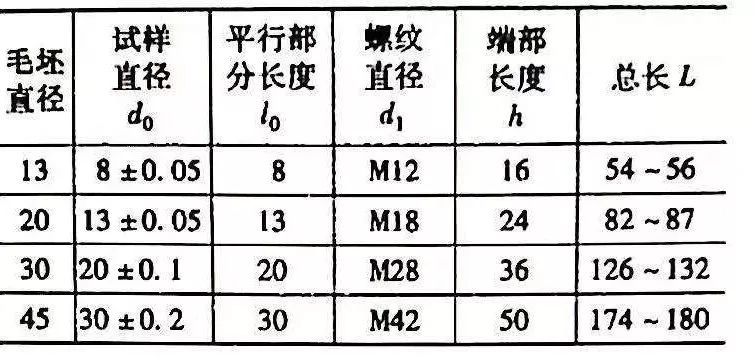
▼表2 球磨铁拉伸试样尺寸(mm)

三、拉伸试验机

拉伸试验机一般由机身、加载机构、测力机构、载荷-伸长记录装置和夹持机构五部分组成。其中加载机构和测力机构是试验机的关键部位,这两部分的灵敏度及精度高低,能正确反映试验机质量的优劣。常用的拉伸试验机的加载机构一般分为机械式(图3)和液压式(图4)两种。
▲图3 机械式加载
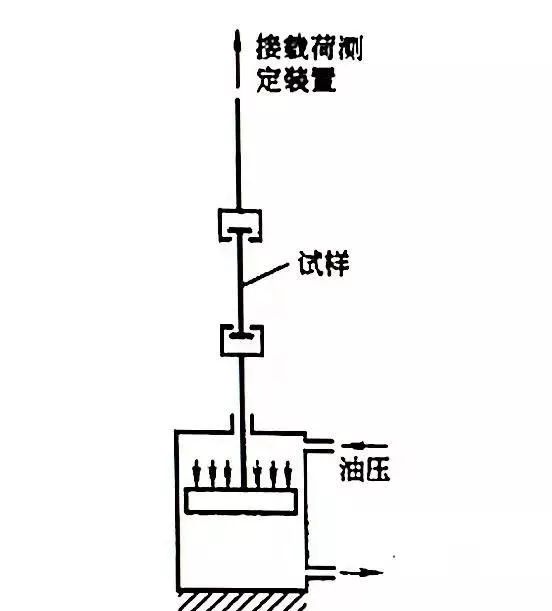
▲图4 液压式加载
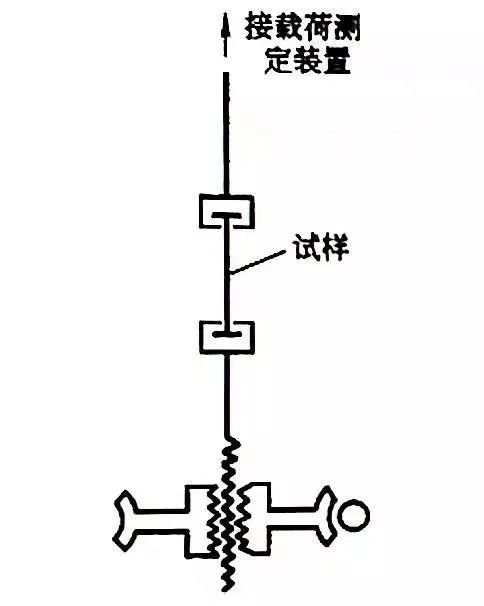
测力机构一般有杠杆式测力(图5)、摆锤式测力(图6)或者两者的结合。比较先进的拉伸试验机大多采用电阻应变载荷传感器测力(图7)。
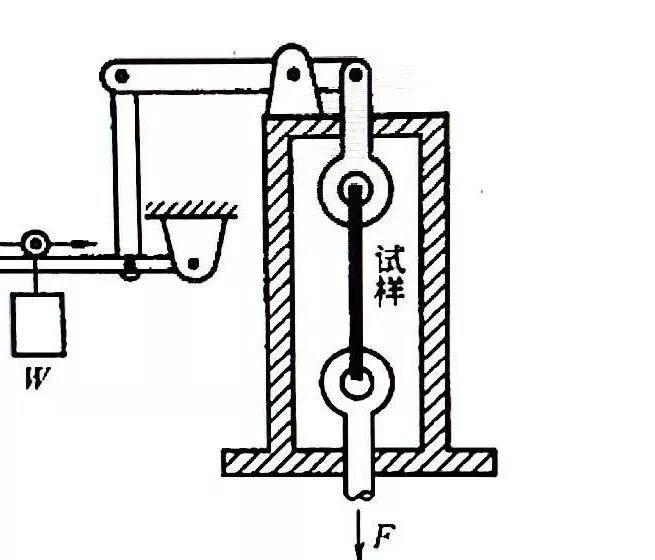
▲图5 杠杆式测力
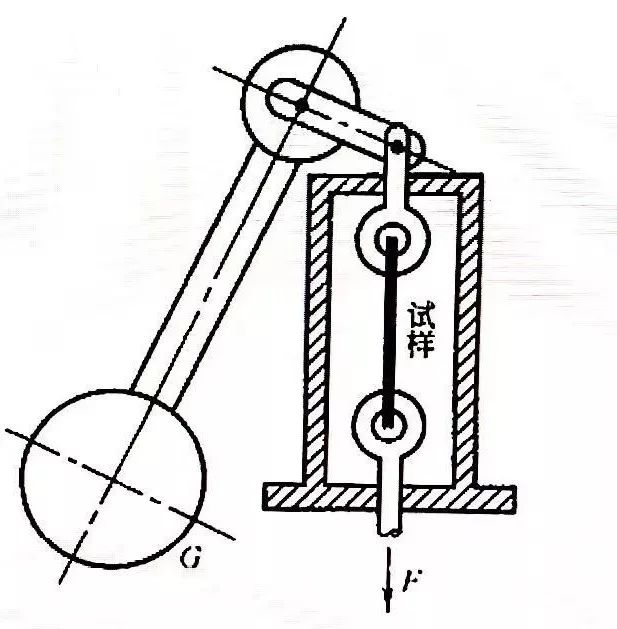
▲图6 摆锤式测力
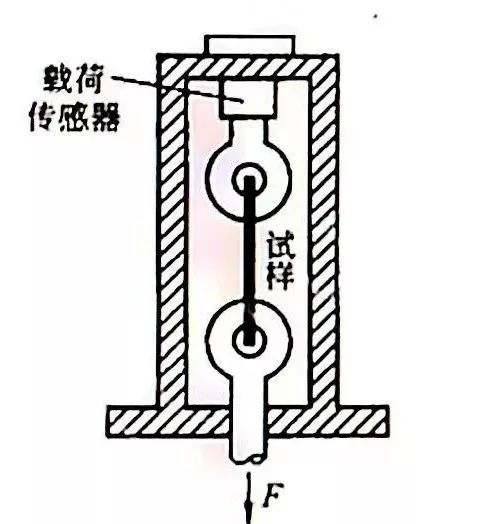
▲图7 电阻应变片载荷传感器测力
拉伸试验机常用的引伸仪有杠杆式(图8)、百分表式、光学(马丁)式(图9)和电子式(差动变压器或电阻应变片式,图10)等。
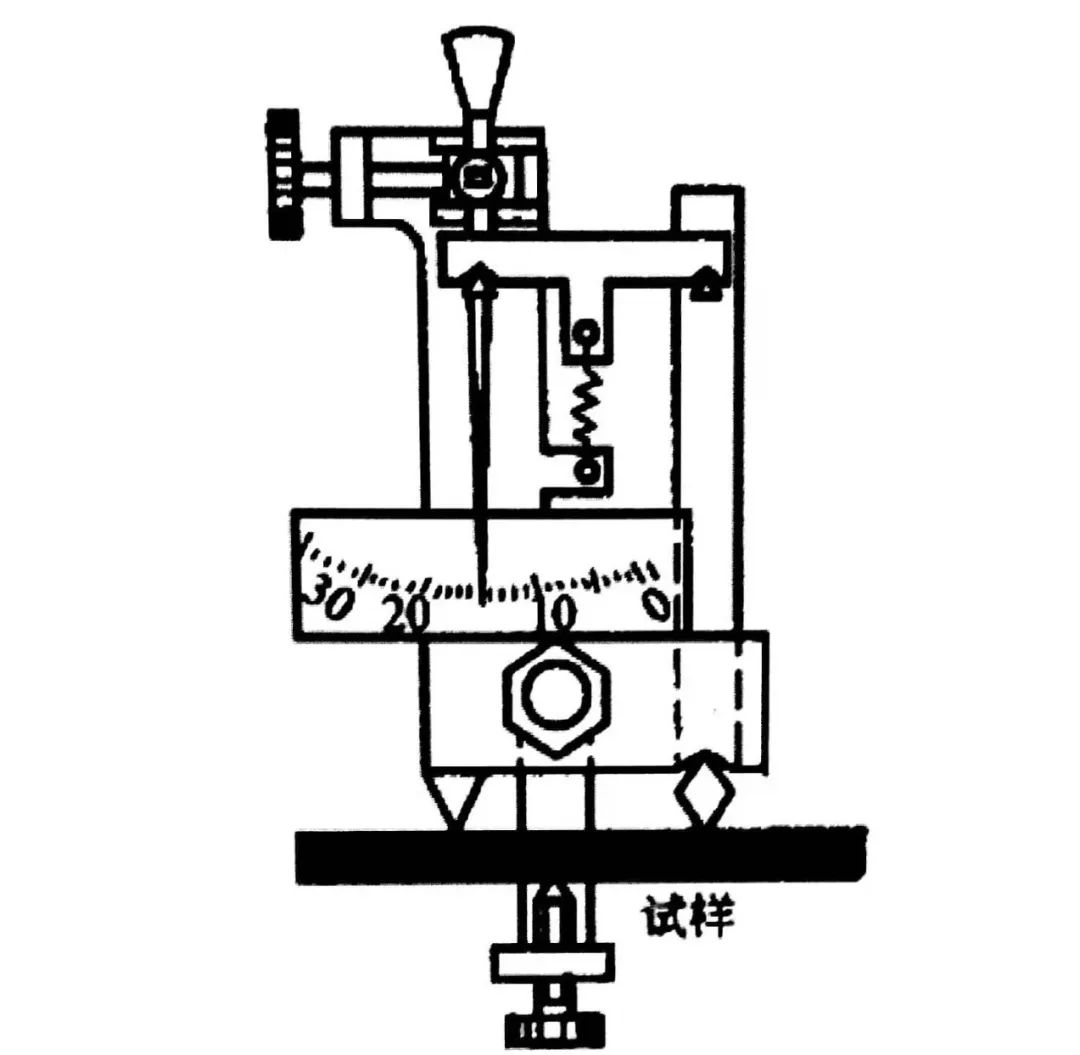
▲图8 杠杆式引伸仪
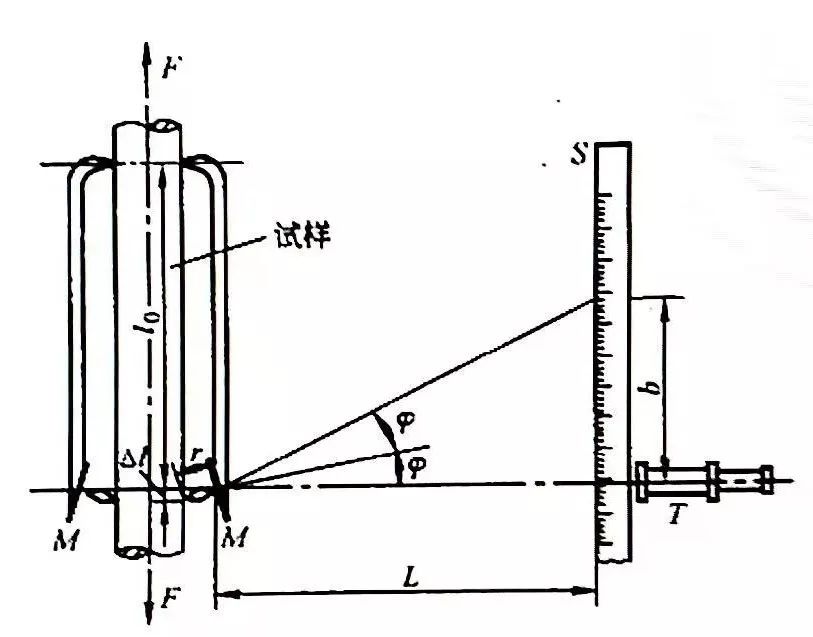
▲图9 光学(马丁)式引伸仪
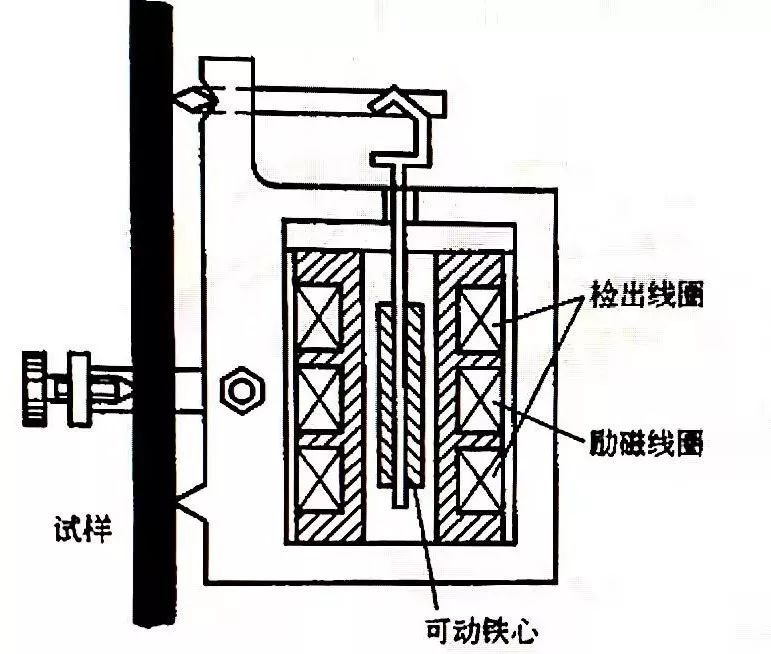
▲图10 电子式(差动变压器)引伸仪
比较先进的还有电子拉伸试验机和自动试验机。电子拉伸试验机采用电子技术,对载荷和变形进行精确测控和自动记录,大多数采用带有电阻应变载荷传感器的测力装置和差动变压器引伸仪或以自整角机同步伺服方式测量变形。这种实验机载荷范围都很款,由于载荷系统跟踪速度很高,能够消除一般锤摆式测力计因惯性较大而引起的测量误差。自动试验机是将电子计算机用于电子拉伸试验机上而成的。可以自动测量试样直径、安装试样,同时自动测定数据并将结果打印出来,全部实验过程自动完成。

全自动拉伸试验机
在液压试验机上,采用灵敏度和精度都很高的电液伺服控制系统,可以精确控制载荷和变形,试样性能的非线性变化也能自动补偿。这种试验机可以保证在选定的载荷状态下或按一定的载荷变形程序进行实验。
试验机上夹头的对中偏差不应超过±0.5mm,以免产生附加弯曲而影响实验结果。为了在试样拉伸过程中自动调节上、下夹头的同心度,一般试验都带有球面支座夹头,使用时,在球面接触处需涂以润滑脂,以保证灵活自如。

四、应力-应变曲线及其力学性能指标
典型的的静拉伸试样采用标长为l0,截面积A0为光滑圆柱试棒进行轴向拉伸试验,低碳钢的负荷 F 与变形 Δl 曲线如图11所示,由图11可得应力(σ=F/S0)和应变(δ=Δl/l0),σ-δ曲线图,见图12。
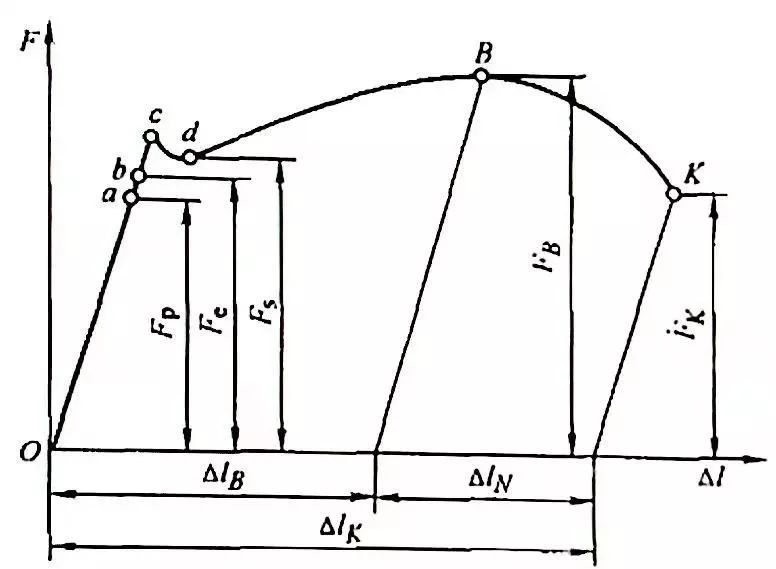
▲图11 低碳钢载荷-变形曲线
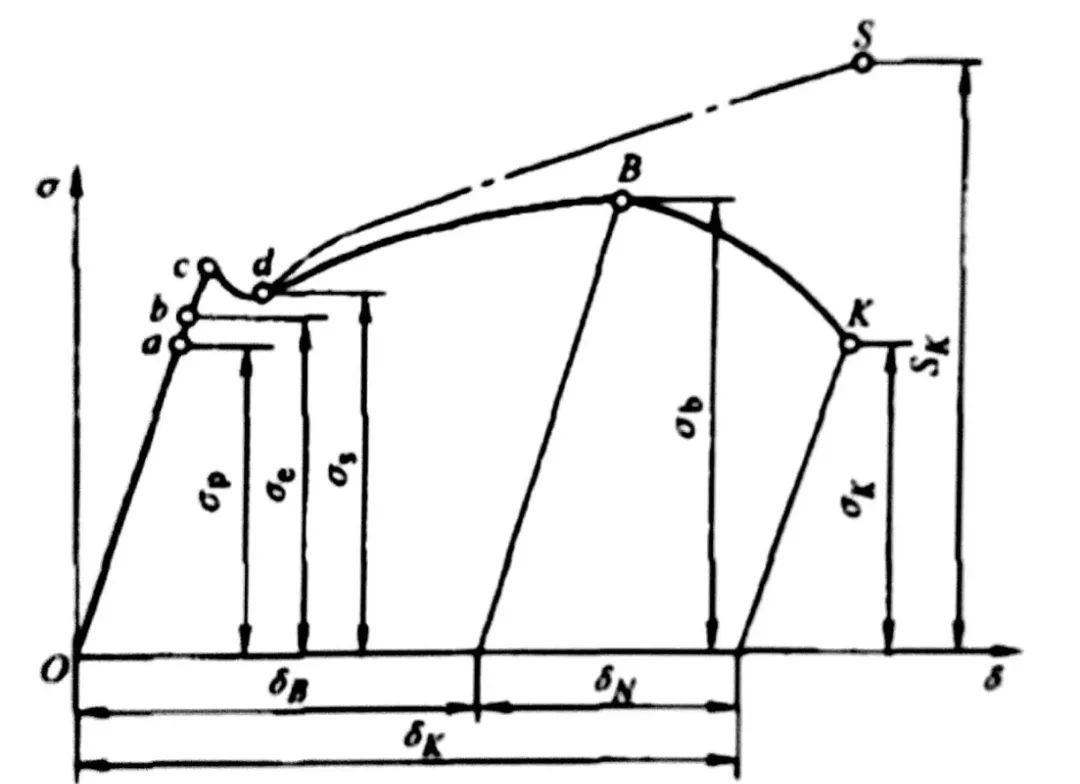
▲图12 低碳钢应力-应变曲线
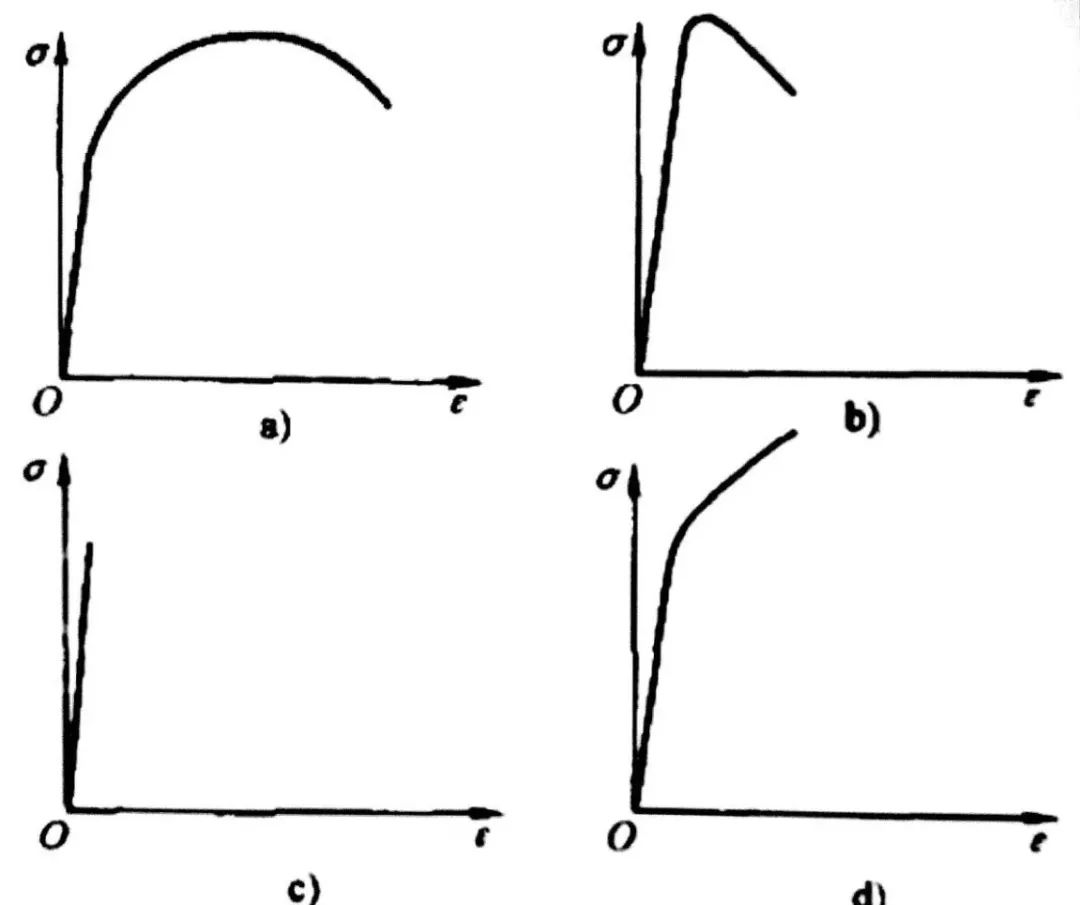
具有铁素体组织或回火索氏体组织的各种结构钢、低合金钢的应力-应变曲线具有类似于上述曲线的形状。除此之外还有图13所示的几种类型的应力-应变曲线。
▲图13几种类型的应力-应变曲线
硬化程度较高的钢,变形时没有物理屈服行为,如图13a曲线所示。经过冷变形的低、中温回火的结构钢、高温回火或退火的高碳钢大都属于种类型。
受到强烈硬化的材料(如经过大变形量冷拔过的钢丝),出现图13b所示的曲线。
对于典型的脆性材料(如淬火的高碳钢等)出现图13c所示的曲线,即在拉伸过程中不出现明显的塑性变形,弹性变形后立即断裂。
对于形变强化能力很强的钢(如高猛耐磨钢等),会出现图13d所示的曲线,断裂前不形成缩颈。
在图12 所示的典型的静拉伸应力-应变曲线中,不同的力学性能指标,分别用不同的符号在图中标注了出来。下面分别加以讨论。

拉伸试验后的试样形貌
4.1 弹性模量
弹性模量标记为E。图中Oc与横轴的夹角为α,则:E=tanα=σ/δ。
E代表材料产生单位弹性变形所需应力的大小,它代表了材料刚度的大小。弹性模量 E 反映了材料原子间结合能力(或叫键合力),因此,一般合金化、热处理、冷热加工等强化手段对 E 的影响不大。所以它是一个对成分、组织、状态不敏感的力学性能指标。
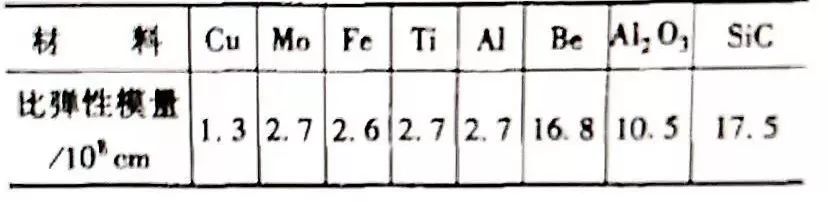
对于空间飞行器用材料,不仅需要考虑刚度,还要考虑密度,通常使用比弹性模量,即:
比弹性模量=弹性模量/密度
几种常用结构材料的比弹性模量列于表3。由表3 可以看出,大多数金属材料的比弹性模量值相差不大,只有铍特别大。一些陶瓷材料的比弹性模量也很大,这是近年来陶瓷在空间技术上广泛应用的原因之一。
▼表3 几种常用材料的比弹性模量
弹性模量的测定可通过精确和放大的应力-应变曲线来计算出来。但是一般是用动力学方法(如声学共振法)来测定。动力学方法与静拉伸试验测定的结果相差大约不超过0.5%。
4.2 屈服点、屈服强度
有屈服效应或者称物理屈服现象的材料,在拉伸过程中载荷不增加或有所下降,而试样继续变形的最小载荷所对应的应力称为屈服点σs,或下屈服点σsl(图14)。不采用载荷开始下降的上屈服点σsu的原因,在于拉伸试样的过渡圆角大小、试样轴线与载荷轴线的重合度、试样表面粗糙度均影响上屈服点的大小。在正常试验条件下,下屈服点再现性比较好,由于屈服应变较大,故观测比较方便。

▲图14 物理屈服现象与上、下屈服点
屈服点按照定义应该是材料开始塑性变形的应力,只有单晶体的屈服点才有物理意义。它对应着位错源开动,开始滑移的临界应力。而在实际多晶体中,由于晶体位向的差别,使各晶粒不可能同时发生塑性变形。当只有少数晶粒开始塑性变形时,宏观并未显示屈服,只有较多晶粒产生塑性变形时,在宏观的的应力-应变曲线上再能显示出来。因此,工程上常用的屈服有三种:
4.2.1比例极限(σp):
应力-应变曲线上符合弹性关系的最高应力(图12中Oa)。超过σp时即认为开始屈服。
4.2.2弹性极限(σel):
试样加载后再卸载,以不出现残留的永久变形为标准,残留能够完全弹性恢复的最高应力,超过 σel 时,即认为才开始屈服。
工程上之所以要区别他们,原出于适用目的。例如枪炮材料要求高的比例极限来保证弹道的准确性,弹簧材料要求有高的弹性极限以保证其可靠性。
4.2.3屈服强度:
以规定发生一定的残留変形为标准,如通常以0.2%残留变形的应力作为屈服强度,符号为σ0.2。
这三种标准在实际测量上都是以残留变形为依据,只不过规定的残留变形不量同,将屈服强度规定为三种情况:
1)规定非比例伸长应力(σp),试样在加载过程中,标准部分的非比例达到规定比例(以%表示)的应力,例如σp0.01、σp0.02等。
2)规定残留伸长应力(σs),试样在卸载后,其标准部分的残留伸长达到规定比例时的应力,常用σs0.2。
3)规定总伸长应力(σt),试样标准部分的总伸长(弹性伸长加塑性伸长)达到规定比例时 的应力如σt0.5。这时应注意σp和σt是在试样加载时直接从σ-ε(F-Δl)曲线上测量的,详见图15。而 σt 要求卸载测量。之所以规定里一种 σt 的测量方法,一方面是为了测量方便,另一方面是有利于材料(灰铸铁、黄铜等)的应力-应变曲线中,本来就没有直线部分,所以,用 σt0.5 表示其屈服强度。
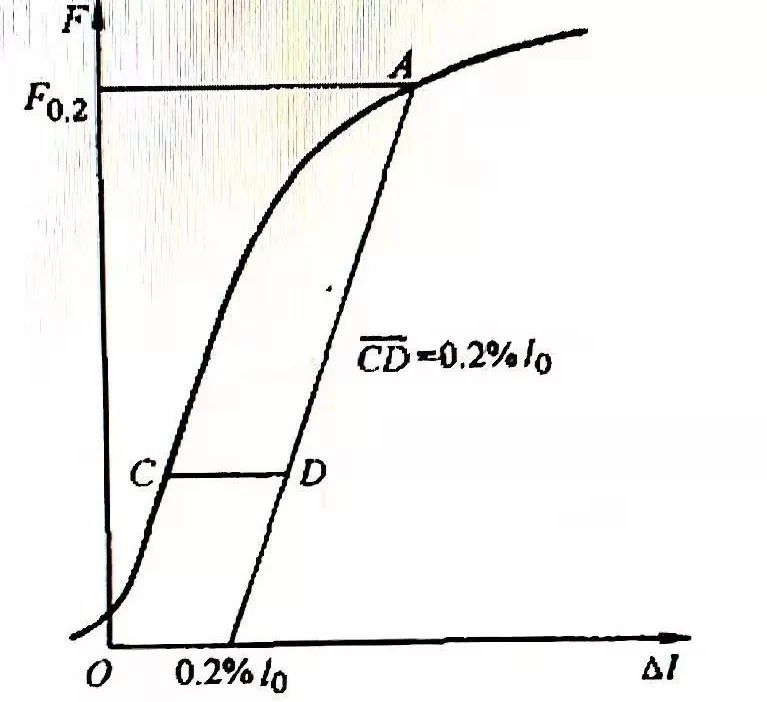
▲图15 用作图法求条件屈服强度
屈服点或屈服强度对材料的成分、组织、状态、温度和加载速度因素十分敏感,通过合金化、热处理、冷热加工等手段可以大幅度地加以改变。
屈服点或屈服强度是机械设计中关于材料的最重要的性能指标之一。对于塑性材料,强度设计以屈服点为标准,规定许用应力[σ ]=σs/n,n为安全系数,一般取 2 或者更大。这表示许用应力不高于屈服强度的一半,或者更低。屈服点或屈服强度不仅直接用于机械设计,在工程上也是材料的某些力学行为和工艺性能的大致度量。例如材料屈服点或屈服强度增高,对应力腐蚀和氢脆就敏感;材料屈服点或屈服强度低,冷加工成型性能和焊接性能就好。
4.3 断后伸长率与断面收缩率
断后伸长率 δ 与断面收缩率 ψ,表示断裂前金属塑性变形的能力。材料塑性是工程材料的重要性能指标。这是因为:
①材料具有一定的塑性,当机件或构件偶尔受到过载荷时能发生塑性变形,它与形变强化相结合,保证了机件的安全而避免突然断裂。
②由于机械构件不可避免地存在截面过度、油孔、沟槽及尖角等,加载后这些部位出现应力集中,具有一定塑性的材料,可以通过应力集中处的局部塑性变形来削减应力峰,使应力重新分配,从而保证零件不致早期开裂。
③材料具有一定的塑性,有利于某些成型工艺(如冷冲压、冷弯、校直等)、修复工艺、和装配工艺的顺利完成。
④ 塑性指标还是金属生产的质量标志,它反映出材料冶金质量的好坏(纯净度、加工质量与热处理水平)。
断后伸长率 δ 表示实验前后试样的相对伸长,计算公式为
断面收缩率 ψ 表示试样截面在试验前后的相对减缩量,计算公式为:
St-S0
ψ= - ———×100%
S0
l0、S0 分别为试验前试样的原始标距长度、原始截面积 ,lt 、St分别为试样断裂后标距伸长后的长度和截面缩小后的截面积。
由图16可以看出,在静拉伸变形过程中,可以分为均匀变形(即标距内试样截面均匀变化)和局部集中收缩变形两部分。
缩颈前均匀变形阶段的最大相对伸长率可表示为:
l0
局部集中变形阶段的相对伸长率可以表示为
l0

ψK=ψB+ψN
研究表明,均匀变形阶段的 ψB 主要取决于金属基体相的状态,它反映了基体已被强化程度的大小(图17)。ψN 代表金属集中塑性变形能力的大小,第二相的数量等因素对它有明显影响(图18)。
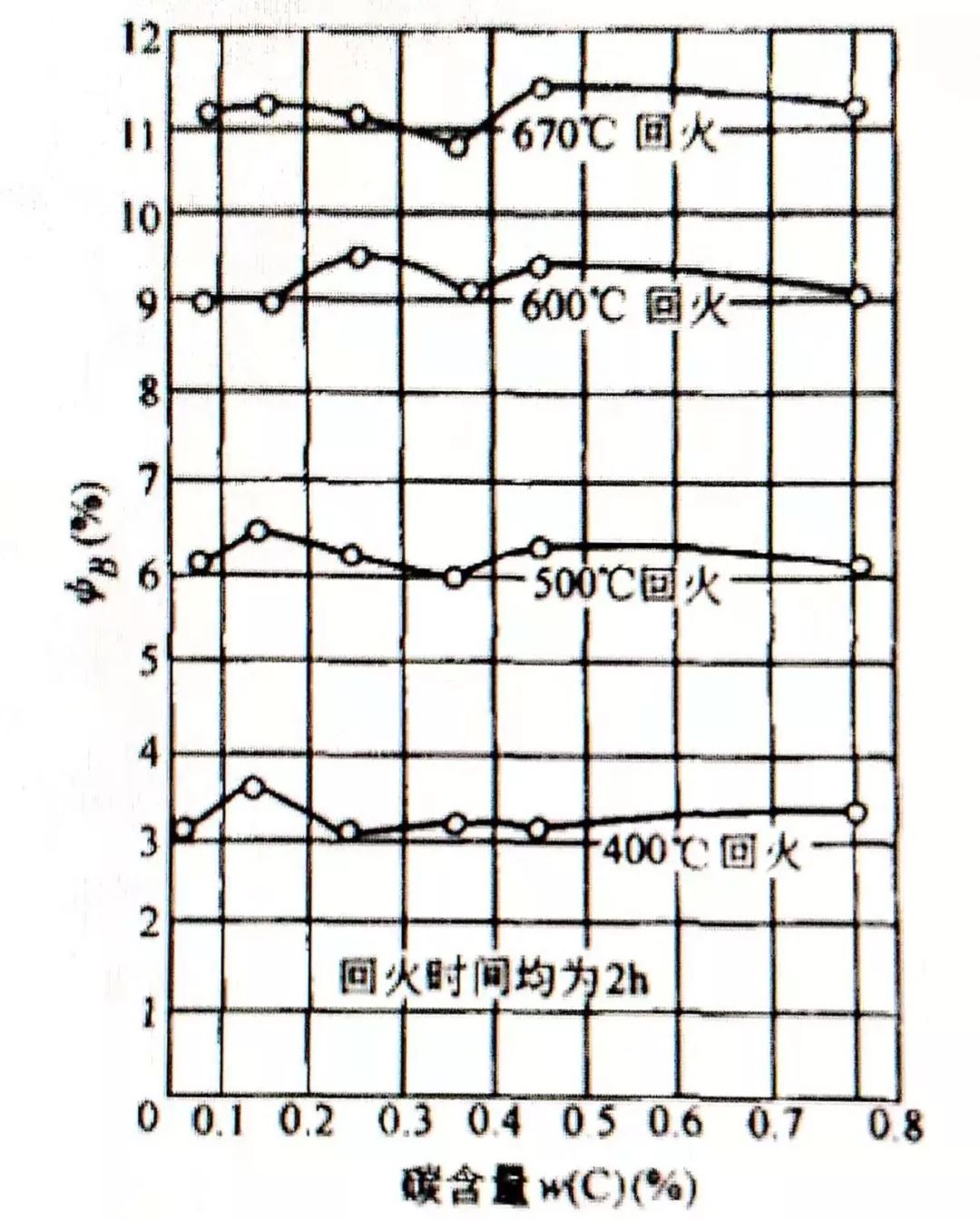
▲图17 不同碳含量碳钢淬火不同温度回火后的ψB值
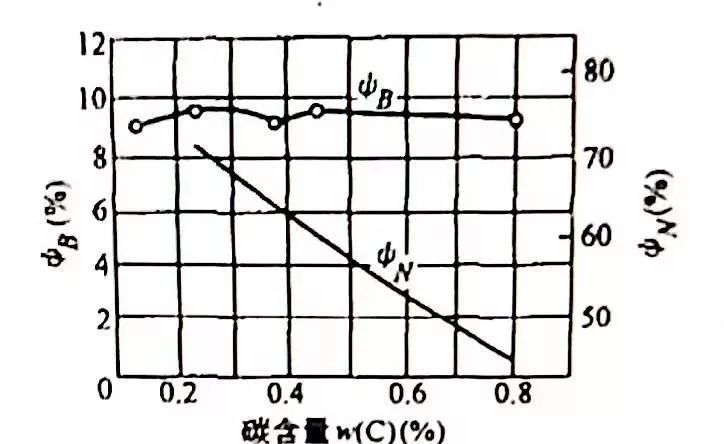
▲图18 不同碳含量刚淬火、600℃回火后ψB和ψN的变化
在试样在 l0=10d0 条件下,断后伸长率δK中δB占的比重大于δN,因此它主要反映了材料均匀变形的能力;而断面收缩率 ψK 中,ψN 所占比例远大于ψB,它主要反映了材料局部集中变形的能力。
五、正应力-应变曲线
正应力为 : σ=F/S
式中S——当试样受载荷F作用时的截面积。
应变以相对伸长 e 或断面收缩率 ψe 表示。它的定义如下,若长度为 l0 的试样受力 f 作用后伸长至 l ,当有一增量 dF 时,试样长度相应变化 dl ,所以de=dl/l 故相对伸长为:
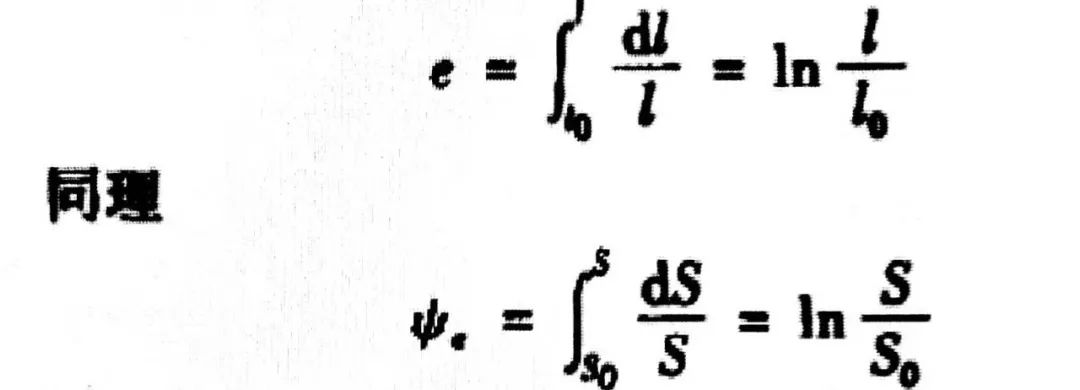
为了避免出现负号通常用-ψe表示
正应力-应变曲线(σ—e曲线)如图19所示。
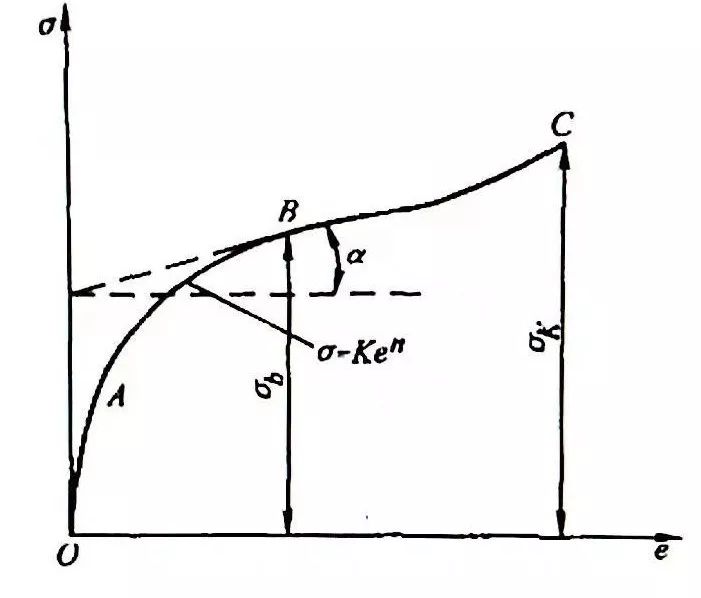
▲图19 正应力-应变曲线(σ—e曲线)
5.1 形变强化指数与形变强化模数
在图19中,OA是弹性变形部分,AB段曲线可以表示为
σ=Keⁿ
式中的n为形变强化指数,可以表征在均匀变形阶段金属形变强化能力。B点以后开始产生缩颈,DC段表示局部集中变形部分,它的斜率D=tanα 为一常数,称为材料的形变强化模数,他表示材料局部集中变形阶段的形变强化能力。
5.2 抗拉强度
抗拉强度又称强度极限,以σb表示,它是在试验过程试样所承受的最大载荷FB与试样原始截面积S0的比值,即σb=FB/S0 。他表征着一定界面的材料所承受的最大载荷,故,它有着重大的实用价值。
六、缺口拉伸与缺口偏斜拉伸
生产上绝大多数机件不是截面均匀、无变化的光滑体,而是存在截面变化的,如键槽、油孔、台阶、螺纹及退刀槽等,这种截面的变化可以简称为缺口。由于缺口的存在,会使静拉伸时的力学行为发生变化。分述如下:
6.1 缺口效应
由于缺口的存在会引起一下一些效应:
1)缺口引起应力集中,使缺口顶端的最大应力大于该截面上的平均应力,如图20所示。
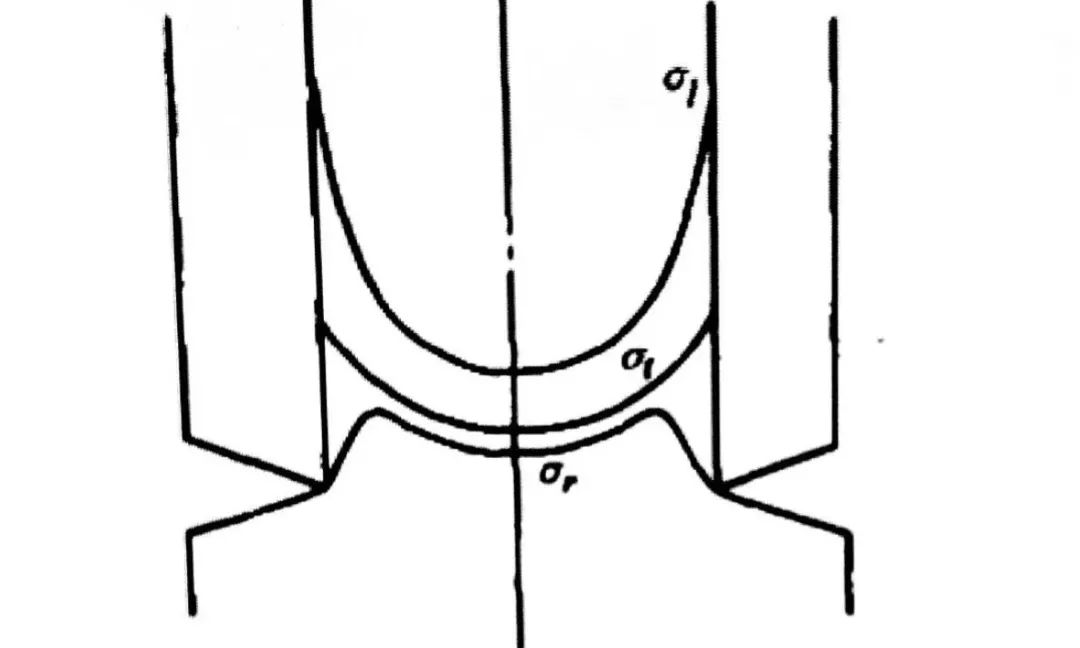
▲图20 缺口试样拉伸时最小截面上的应力分布
图中 σl 为轴向应力,σt为切向应力,σr为径向应力。为了描写应力集中情况,采用缺口截面上最大轴向应力σLmax和该截面上的平均应力σm之比,称为应力集中系数K了,即:
Kl=σLmax/σm
2)缺口的存在,引起多轴应力状态。由图20可以看出,缺口拉伸时,不仅存在轴向应力,还存在切向应力和径向应力,出现所谓多轴应力状态。由于这种多轴应力的存在,使抗拉强度升高,并使材料向脆性状态转化。
6.2 缺口静拉伸试验
为了测定金属材料在静拉伸下对缺口的敏感程度,要进行缺口拉伸试验。缺口的形状件图21 。
▲图21 缺口拉伸试样的缺口形状
缺口试样在拉伸过程中,在弹性状态下的应力分布如图20所示。当发生塑性变形后,将发生如图22所示的变化。随着塑性变形的发展,塑性区逐步向心部发展,在塑性区与弹性区交界处出现最大应力,当这个最大应力超过材料断裂强度时,便在该区发生断裂。不难看出,若不发生塑性变形或很少发生塑性变形断裂,则断裂起源于缺口根部表面。塑性越好,断裂源越向中心移动。
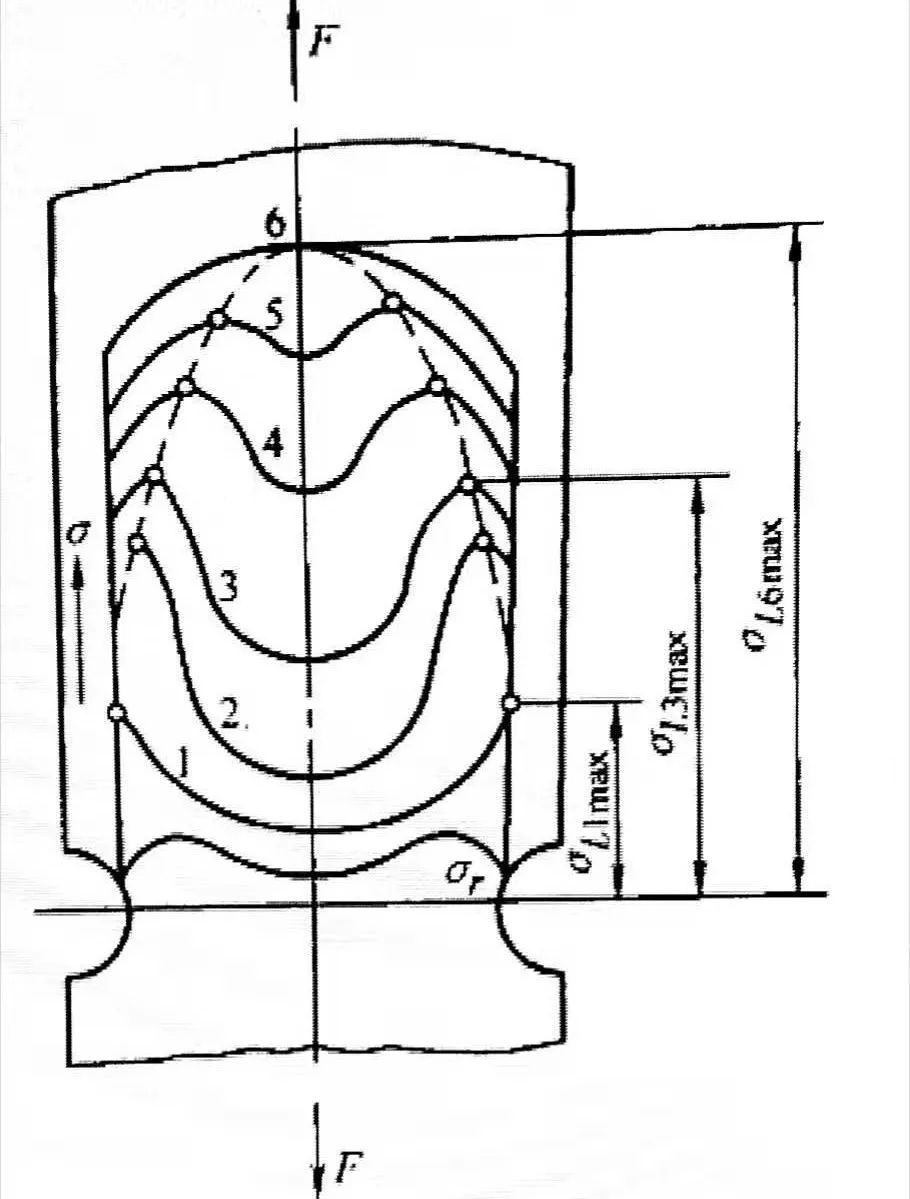
▲图22 缺口试样塑性变形时的应力分布
通常用缺口强度比 NSR 作为衡量静拉伸下缺口敏感指数
NSR=σbN/σb
式中σbN——表示缺口拉伸试样的抗拉强度。
通常的缺口拉伸试样形状如图23所示。
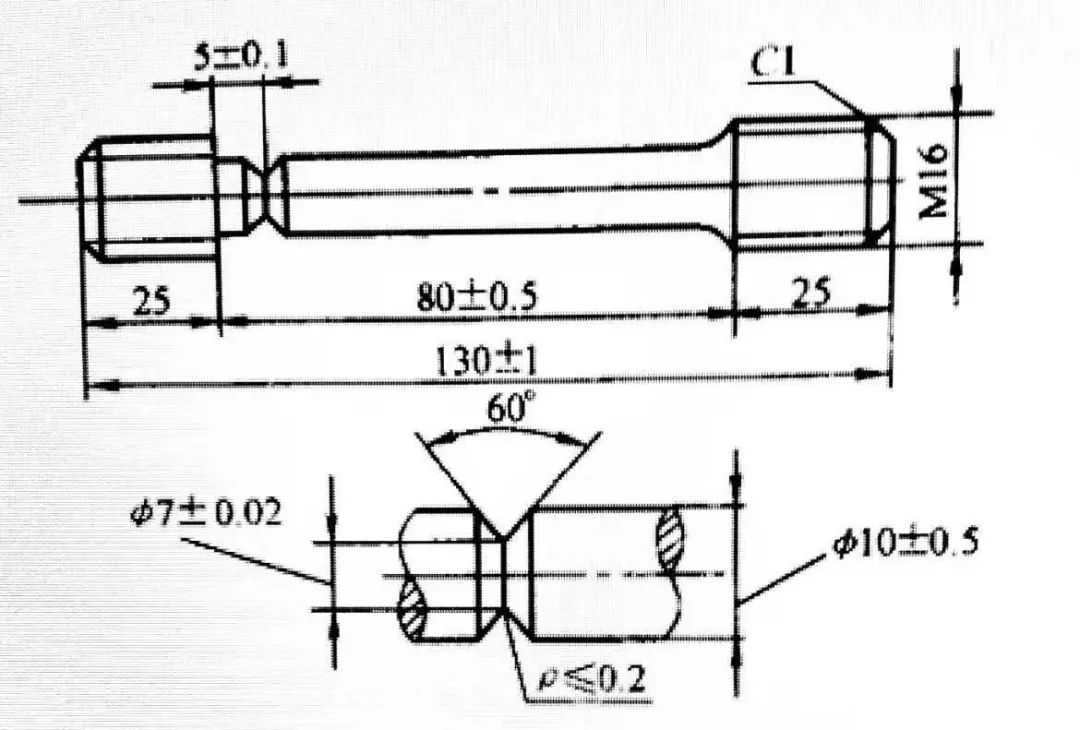
▲图23 缺口拉伸试样
一般认为,NSR<1,即σbN<σb,说明材料对缺口敏感。事实上,表现为这种情况的金属并不多,大多为已知的所谓脆性材料,如铸铁、淬火加底纹回火的高碳钢。绝大多数金属NSR>1,这时因为只要缺口处发生少量塑性变形就可以使NSR>1,但这并不能说明金属对缺口不敏感。因此,单纯凭缺口拉伸试验,按NSR>1来选材和制定工艺是不可靠的。
6.3 缺口偏斜拉伸试样
对于一些重要的承载螺钉,在制造安装和使用过程中,不可避免地存在因斜偏影响带来的附加弯曲。为此,应当进行图24所示的缺口斜偏拉伸试样。
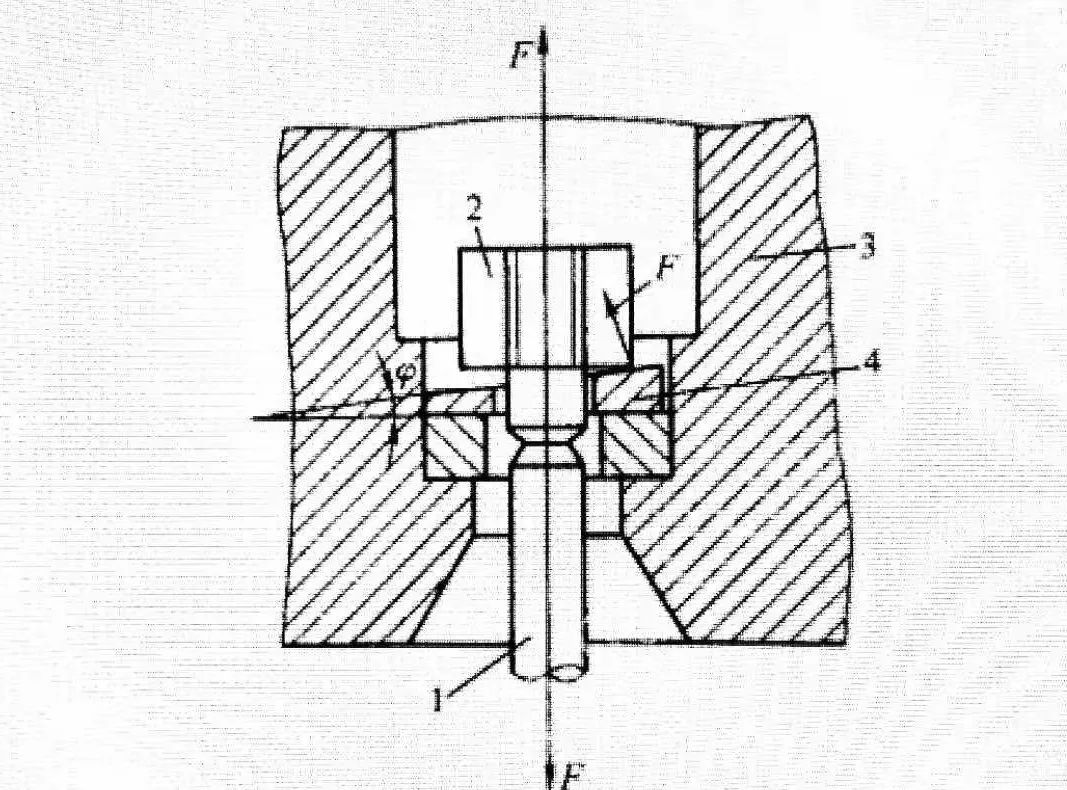
▲图24 缺口斜偏拉伸试试验装置
1-试样 2-螺纹夹头 3-试验机上夹头 4-垫圈
 表示。
表示。
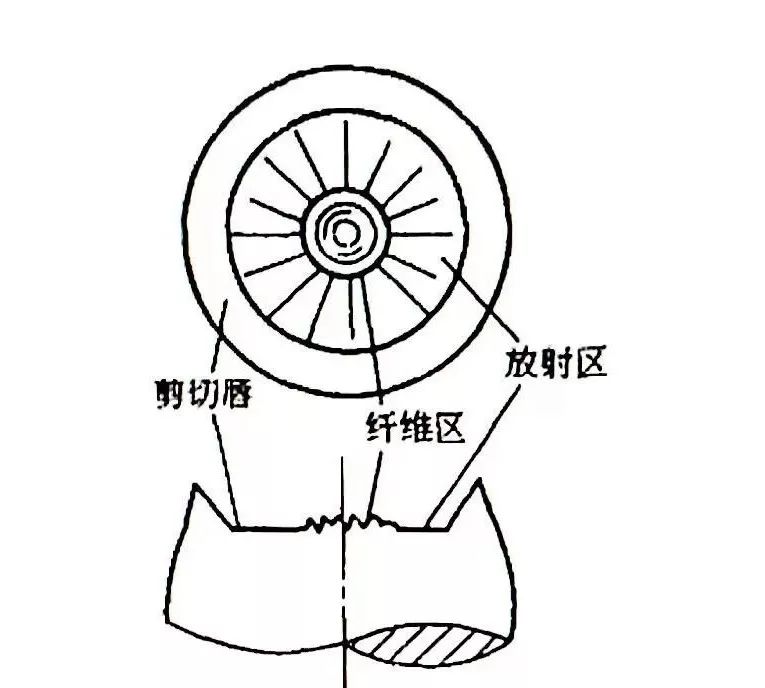
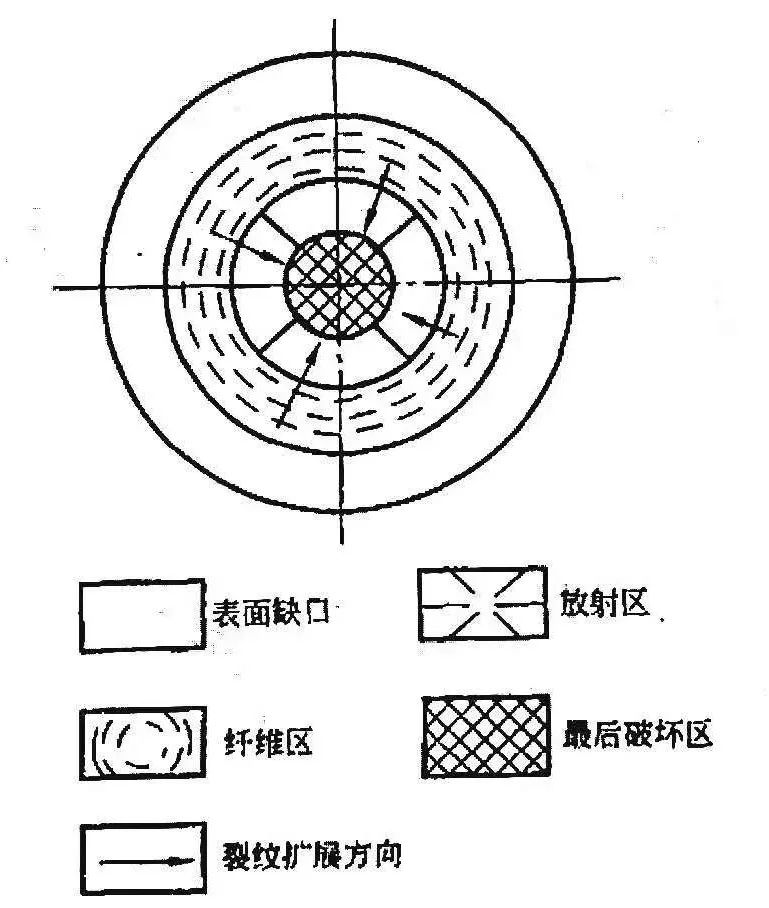
8.2 带缺口的圆形拉伸试样断口
带缺口的圆形拉伸试样,由于缺口处应力集中,裂纹直接在缺口或缺口附近产生。此时其纤维区不是在试样端口中央而是沿圆周分布,而后向内部扩展(图26)。若缺口较钝,则裂纹仍可能在试样中心形成。缺口裂纹也可能以不对称方式扩展,形成较为复杂的断口形貌。
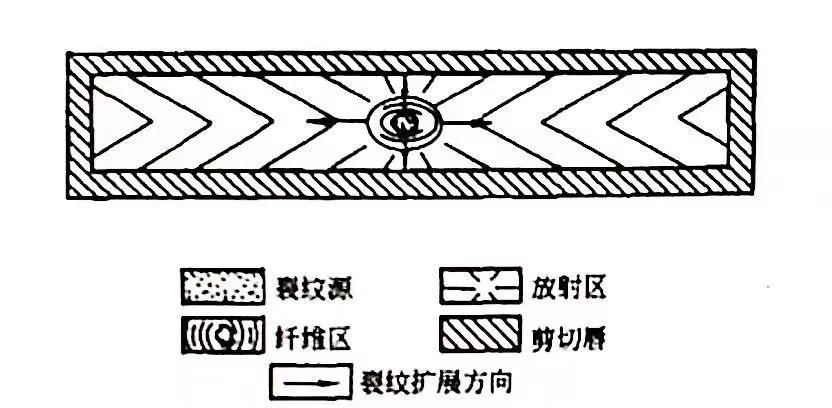
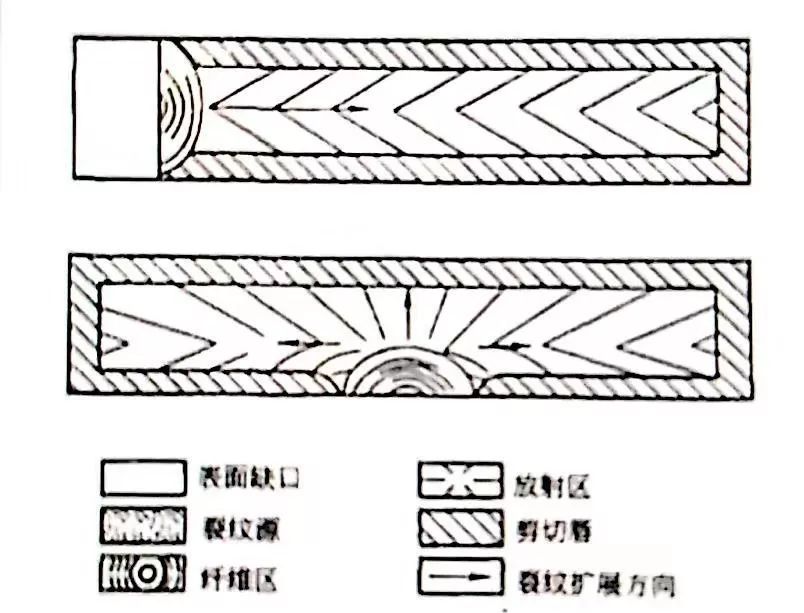
矩形拉伸试样图样
10.2 试样形状与尺寸的影响
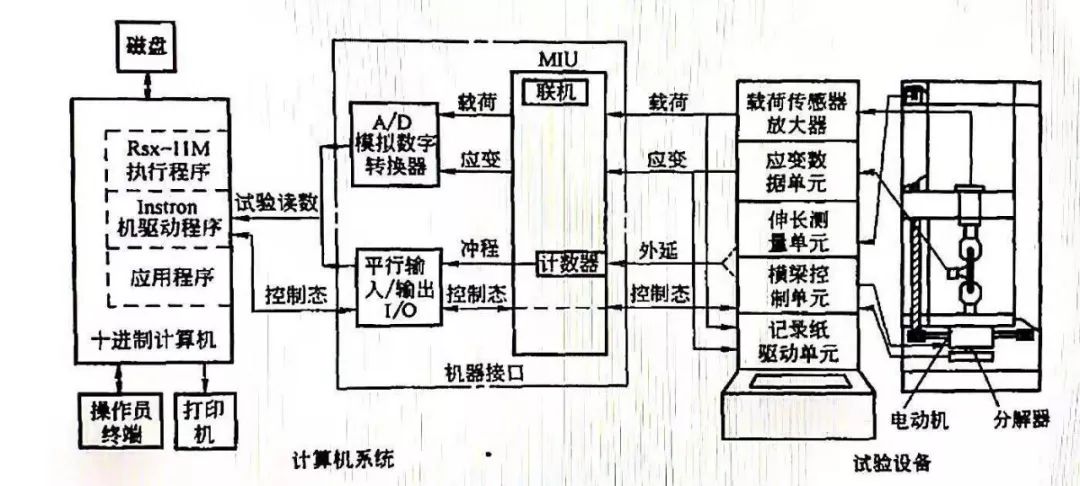
图29 拉伸试验机的控制框图
相关文章:
